Πανευτυχής αφού έφτασα σε σημείο να μπορώ να μοντάρω πλέον μόνος μου το πρώτο μου αεροπλάνο (ας είναι και ARF) ^%^ αναρωτιέμαι ποιός είναι τελικά ο σωστός τρόπος σύνδεσης της μεταλλικής ντίζας με τους μοχλούς κίνησης (χορν) των servo.
1) Βαρελάκι (σφικτήρας)
2) Στραβώνοντας την ντίζα με την ειδική πένσα Ζ
3) Τοποθετώντας ελικοπτερικά ball ring
4) Η τα κουμπωτά κλιπς που έχουν κυρίως οι πλαστικές ντίζες, που σε αυτήν την περίπτωση, όπως και στα ball ring θα πρέπει να φτιάξουμε πάσα(σπείρωμα) στην μεταλλική ντίζα.
Σύνδεση ντίζας σε servo
-
bladeskiller
- Δημοσιεύσεις: 712
- Εγγραφή: Τρί Απρ 08, 2008 4:12 pm
Απάντηση: Σύνδεση ντίζας σε servo
Εγώ πάντως προτιμώ πάντα στη μεριά του σερβό το βαρελάκι με τη σκουληκόβιδα. Είναι πολύ εύκολο να κεντραρεις ένα πηδάλιο έτσι και ποτέ δεν μου έχει τύχει να λασκάρει η σκουληκόβιδα. Στο κάτω κάτω το locktite γιαυτό είναι. Εκείνο που χρειάζεται προσοχή βέβαια είναι ο τρόπος που στηρίζεται το βαρελάκι στο μπράτσο του σερβό. Προτιμώ τα βαρελάκια που παίρνουν ασφάλεια είτε μεταλλική είτε λαστιχένια από κάτω. Τα άλλα με το παξιμάδι καμιά φορά λασκάρουν.
Φιλικά Κώστας.
Φιλικά Κώστας.

Απάντηση: Σύνδεση ντίζας σε servo
Σωστοοοος ο Κωστας.
Μastora μου, οπως και ο Κωστας ξερει, και σαν ελικοπτερας, το απολυτο ενωμα ειναι Βall-link's και ρυθμιζομενη ντιζα, ωστε να μην υπαρχει καθολου ντζογος-παιξιμο. Επειδη ομως στα α/φ πολλες φορες δεν υπαρχει ο αναγκαιος χωρος για την ρυθμιση της ντιζας, βαζουμε απλη ντιζα και με την πενσα των Ball-link ανοιγουμε-ξεκουμπωνουμε και ρυθμιζουμε στο επιθυμητο μηκος.
Μastora μου, οπως και ο Κωστας ξερει, και σαν ελικοπτερας, το απολυτο ενωμα ειναι Βall-link's και ρυθμιζομενη ντιζα, ωστε να μην υπαρχει καθολου ντζογος-παιξιμο. Επειδη ομως στα α/φ πολλες φορες δεν υπαρχει ο αναγκαιος χωρος για την ρυθμιση της ντιζας, βαζουμε απλη ντιζα και με την πενσα των Ball-link ανοιγουμε-ξεκουμπωνουμε και ρυθμιζουμε στο επιθυμητο μηκος.
Απάντηση: Σύνδεση ντίζας σε servo
Δημήτρη, πολύ ενδιαφέρουσα η ερώτησή σου, η οποία κατά τη γνώμη μου ΔΕΝ έχει μια και μοναδική απάντηση.
Κατά τη γνώμη μου μια σύνδεση της ντίζας με την κεφαλή του servo πρέπει να πληροί τρεις βασικές ιδιότητες:
Δυστυχώς δεν έχω (ούτε και ξέρω να υπάρχουν) στατιστικά στοιχεία για το ποιο είδος σύνδεσης είναι το ανθεκτικότερο, άρα θα πρέπει να κρίνω με τα προσωπικά μου κριτήρια και εμπειρία. Αν κάτι μου φαίνεται προβληματικό σε μια εφαρμογή δεν το χρησιμοποιώ. Διαφορετικά θα κρίνω τη σύνδεση στο πηδάλιο υψους-βάθους του Easy Glider και διαφορετικά στο Last Down. Ακόμα πιο διαφορετικά σε ένα warbird ή ένα ελικόπτερο.
Σε κάθε περίπτωση προσέχω η τρύπα του μοχλού να είναι ακριβώς όση χρειάζεται, και όχι μεγαλύτερη για να αποφύγω τον τζόγο.
Επίσης, η ανάγκη ρύθμισης δεν χρειάζεται και στα δύο μέρη της ντίζας, αλλά μόνο στο ένα (το πιο έυκολα προσβάσιμο), ενώ στο άλλο χρησιμοποιώ Z-bend ή L-bend (που είναι απλούστερα και άρα πιο αξιόπιστα)

Z-bend

L-Bend / Quick Connector
(... συνεχίζεται...)
Κατά τη γνώμη μου μια σύνδεση της ντίζας με την κεφαλή του servo πρέπει να πληροί τρεις βασικές ιδιότητες:
- Να ευθυγραμμίζεται κατάλληλα με το μοχλό κίνησης
- Να είναι αρκετά δυνατή ώστε να αντέχει στις δυνάμεις που απαιτούνται για να κινήσει κατάλληλα το πηδάλιο (τι να το κάνω το πεντάκιλο σερβο των 100 αν η ντίζα και η σύνδεσή της αντέχει 2 κιλά μόνο??)
- Να μην έχει τζόγο
Δυστυχώς δεν έχω (ούτε και ξέρω να υπάρχουν) στατιστικά στοιχεία για το ποιο είδος σύνδεσης είναι το ανθεκτικότερο, άρα θα πρέπει να κρίνω με τα προσωπικά μου κριτήρια και εμπειρία. Αν κάτι μου φαίνεται προβληματικό σε μια εφαρμογή δεν το χρησιμοποιώ. Διαφορετικά θα κρίνω τη σύνδεση στο πηδάλιο υψους-βάθους του Easy Glider και διαφορετικά στο Last Down. Ακόμα πιο διαφορετικά σε ένα warbird ή ένα ελικόπτερο.
Σε κάθε περίπτωση προσέχω η τρύπα του μοχλού να είναι ακριβώς όση χρειάζεται, και όχι μεγαλύτερη για να αποφύγω τον τζόγο.
Επίσης, η ανάγκη ρύθμισης δεν χρειάζεται και στα δύο μέρη της ντίζας, αλλά μόνο στο ένα (το πιο έυκολα προσβάσιμο), ενώ στο άλλο χρησιμοποιώ Z-bend ή L-bend (που είναι απλούστερα και άρα πιο αξιόπιστα)
Z-bend
L-Bend / Quick Connector
(... συνεχίζεται...)
Απάντηση: Σύνδεση ντίζας σε servo
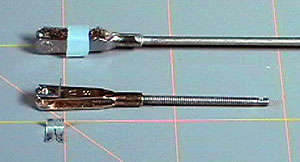
Τα EZ-connectors ("βαρελάκι-σκουληκόβιδα") τα χρησιμοποιώ μεν, αλλά όσο λιγότερο μπορώ δε. Δεν μου γεμίζουν το μάτι, γιατί με τον καιρό η ασφάλεια (πλαστική ή σιδερένια) χαλαρώνει κι έτσι αρχίζουν οι τζόγοι. Αυτό υποβοθείται και από το γεγονός ότι εκ κατασκευής αναπτύσσονται ροπές ανάμεσα στο μοχλό του σερβο και τον EZ-connector, γιατί η ντίζα και ο μοχλός βρίσκονται σε αρκετή απόσταση μεταξύ τους.


EZ-Connector (αριστερά με ασφάλεια - δεξιά με βίδα)
Περισσότερο χρησιμοποιώ τα "πιαστράκια" (clevises) με σπείρωμα, μεταλλικά ή πλαστικά. Στα μεταλλικά όμως χρησιμοποιώ πάντα και "κόντρα παξιμάδι" και locktite.
clevises (μεταλλικά χωρίς/με σπείρωμα)
Τα ball-link που λέει ο Χρήστος όντως είναι τα καλύτερα, αλλά λάβε υπόψη σου ότι το πολύ "βάλε-βγάλε" δημιουργεί τζόγους. Στο ελικόπτερο αυτό δεν συμβαίνει γιατί οι περισσότερες ρυθμίσεις είναι έτοιμες και δεν χρειάζονται πολλές ρυθμίσεις μετά την κατασκευή.

Ball-link connectors
Βέβαια είναι η καλύτερη λύση για τις περιπτώσεις που η κεφαλή του servo κάνει γωνία σε σχέση με το μοχλό κίνησης του πηδαλίου ελέγχου:

Ball-link connectors
Ενας γενικός κανόνας είναι να λαμβάνουμε υπόψη και τις οδηγίες του κατασκευαστή - και νομίζω ότι στην συγκεκριμένη περίπτωση αυτόν πρέπει να ακολουθήσεις.
(Οι φωτογραφίες είναι από τις σελίδες Airfield Models
και Towerhobbies
)
Φιλικά,
Βαγγέλης
EZ-Connector (αριστερά με ασφάλεια - δεξιά με βίδα)
Περισσότερο χρησιμοποιώ τα "πιαστράκια" (clevises) με σπείρωμα, μεταλλικά ή πλαστικά. Στα μεταλλικά όμως χρησιμοποιώ πάντα και "κόντρα παξιμάδι" και locktite.
clevises (μεταλλικά χωρίς/με σπείρωμα)
Τα ball-link που λέει ο Χρήστος όντως είναι τα καλύτερα, αλλά λάβε υπόψη σου ότι το πολύ "βάλε-βγάλε" δημιουργεί τζόγους. Στο ελικόπτερο αυτό δεν συμβαίνει γιατί οι περισσότερες ρυθμίσεις είναι έτοιμες και δεν χρειάζονται πολλές ρυθμίσεις μετά την κατασκευή.
Ball-link connectors
Βέβαια είναι η καλύτερη λύση για τις περιπτώσεις που η κεφαλή του servo κάνει γωνία σε σχέση με το μοχλό κίνησης του πηδαλίου ελέγχου:
Ball-link connectors
Ενας γενικός κανόνας είναι να λαμβάνουμε υπόψη και τις οδηγίες του κατασκευαστή - και νομίζω ότι στην συγκεκριμένη περίπτωση αυτόν πρέπει να ακολουθήσεις.
(Οι φωτογραφίες είναι από τις σελίδες Airfield Models
και Towerhobbies
)
Φιλικά,
Βαγγέλης
-
mastoras
Απάντηση: Σύνδεση ντίζας σε servo
Ευχαριστώ φιλαράκια για τις απαντήσεις σας, που θα με βοηθήσουν αρκετά στην ολοκλήρωση του μοντέλου.
Βαγγέλη άξιζε ο κόπος για την φώτο παρουσίαση, γιατί νομίζω ότι αυτός ο τρόπος, είναι σωτήριος για να λύνονται οι κάθε είδους τεχνικές απορίες.
Βαγγέλη άξιζε ο κόπος για την φώτο παρουσίαση, γιατί νομίζω ότι αυτός ο τρόπος, είναι σωτήριος για να λύνονται οι κάθε είδους τεχνικές απορίες.
Απάντηση: Σύνδεση ντίζας σε servo
καλησπέρα !
όντος πολύ κατατοπιστικός μπράβο και σε όλους βεβαία
να το προχωρήσουμε λίγο παραπάνω και να πούμε-δείξουμε
απο την αρχή πως σετάρουμε ενα servo ώστε να μας δίνει full κινηση στα πηδάλια
όντος πολύ κατατοπιστικός μπράβο και σε όλους βεβαία
να το προχωρήσουμε λίγο παραπάνω και να πούμε-δείξουμε
απο την αρχή πως σετάρουμε ενα servo ώστε να μας δίνει full κινηση στα πηδάλια
Απάντηση: Σύνδεση ντίζας σε servo
Η σωστή συνδεσμολογία των ντιζών (pushrod) ελέγχου
Οταν συνδέουμε τις ντίζες στις επιφάνειες ελέγχου και στους σερβομηχανισμούς, είναι απαραίτητο να εξασφαλίζουμε τη σωστή γεωμετρία, συγκρίνοντας δύο μεγέθη:

Σχήμα 1
ΕΞΑΙΡΕΤΙΚΑ ΕΠΙΚΙΝΔΥΝΗ ΣΥΝΔΕΣΜΟΛΟΓΙΑ
Μια πραγματικά επικίνδυνη συνδσμολογία προκύπτει όταν το ακρόντιζο είναι συνδεδεμένο στην εξωτερική τρύπα του σερβο-βραχίονα, ενώ το ακρόντιζο στην επιφάνεια ελέγχου είναι συνδεδεμένο στην εσωτερική τρύπα του βραχίονα ελέγχου (control horn). Η συνδεσμολογία αυτή επιλέγεται συνήθως από πιλότους που θέλουν τεράστιες κινήσεις στα πηδάλια για να κάνουν ελιγμούς 3D (Σχήμα 2).

Σχήμα 2
Όταν οι ντίζες είναι συνδεμένες με αυτόν τον τρόπο, κάθε "τζόγος" στο όλο σύστημα μεγενθύνεται σημαντικά με αποτέλεσμα να προκαλείται το γνωστό (και πολλές φορές καταστροφικό) fluttering (τρεμόπαιγμα ή συντονισμός της επιφάνειας ελέγχου).
Επιπλέον, αν ρυθμίσετε το ATV ή Travel Adjustment από τον πομπό σας ώστε να έχετε "κανονικές" κινήσεις, το αποτέλεσμα θα είναι να μικρύνετε την ανάλυση του καναλιού και την ακρίβεια στο κεντράρισμα ή στο "κράτημα" σε συγκεκριμένη θέση.
Το πιο σημαντικό είναι πως η επιφάνεια ελέγχου μεταδίδει (λόγω του μοχλού που δημιουργείται) ενισχυμένες τις δυνάμεις που δέχεται από την ροή του αέρα προς το σέρβο,με αποτέλεσμα το "φάγωμα" των γραναζιών και/ή του σερβοβραχίονα και επακόλουθο την πτώση/σύγκρουση του μοντέλου.
ΒΕΛΤΙΣΤΗ ΣΥΝΔΕΣΜΟΛΟΓΙΑ
Η βέλτιστη συνδεσμολογία προκύπτει όταν το ακρόντιζο στην μεριά του σερβομηχανισμού είναι κουμπωμένο στην πιο εσωτερική τρύπα του σερβο-βραχίονα, ενώ στον βραχίονα ελέγχου είναι κουμπωμένο στην πιο εξωτερική τρύπα (Σχήμα 3)

Σχήμα 3
Η συνδεσμολογία αυτή μεγιστοποιεί μηχανικά την απόδοση του σερβομηχανισμού στην επιφάνεια ελέγχου, δίνοντας την μεγαλύτερη ροπή, την καλύτερη δυνατή ανάλυση, ελαχιστοποιεί τους "τζόγους" και δίνει το καλύτερο δυνατό κεντράρισμα και "κράτημα" σε μια θέση της επιφάνειας ελέγχου.
Σε αυτή την περίπτωση πρέπει να προσέξουμε ιδιαίτερα ώστε η κίνηση του σερβο-βραχίονα να είναι ανεμπόδιστη σε όλη τη διαδρομή της και το ακρόντιζο να μην "βρίσκει" στο σερβοβραχίονα ή στο κουτί του σερβομηχανισμού.
ΑΠΟΔΕΚΤΗ ΣΥΝΔΕΣΜΟΛΟΓΙΑ
Σε επρίπτωση που η πιο πάνω Βέλτιστη Συνδεσμολογία δεν μας δίνει το επιθυμητό εύρος κίνησης, τότε έχουμε δύο επιλογές:

Σχήμα 4
Η καλύτερη επιλογή είναι η πρώτη γιατί αυτή εισάγει λιγότερο τζόγο στό όλο σύστημα ελέγχου.Αφού εξαντλήσουμε αυτή τη δυνατότητα και επιθυμούμε να αυξήσουμε περαιτέρω το εύρος κίνησης, τότε μόνο προχωρούμε και στη δεύτερη επιλογή (Σχήμα 4).
Γενικά, με τα σημερινά συστήματα τηλεκατεύθυνσης, προτιμάμε να έχουμε τις ρυθμίσεις ATV/Travel Adjustment όσο το δυνατόν πιο κοντά στο 100% και ταυτόχρονα να έχουμε και το επιθυμητό εύρος κίνησης. Σε αυτή την περίπτωση μπορούμε αυξάνοντας το ATV/Travel Adjustment στο 130% να έχουμε εύρος κίνησης κατάλληλο για 3D και μειώνοντάς το στο 70-80% να έχουμε (με dual-rates) αποδεκτή ανάλυση και εύρος κίνησης για normal πτήση.
(Τα σχήματα τα "δανείστηκα" από την σελίδα της Hobbico
- και την ευχαριστώ)
Ελπίζω το άρθρο να είναι κατανοητό. Σε κάθε περίπτωση πάντως θα προσπαθήσω να εξηγήσω κάθε απορία.
Βαγγέλης
Οταν συνδέουμε τις ντίζες στις επιφάνειες ελέγχου και στους σερβομηχανισμούς, είναι απαραίτητο να εξασφαλίζουμε τη σωστή γεωμετρία, συγκρίνοντας δύο μεγέθη:
- την απόσταση μεταξύ του ακρόντιζου του σερβο-βραχίονα (servo arm) και του άξονα περιστροφής του servo (servo arm offset στο Σχήμα 1)
- την απόσταση του ακροντιζου στην επιφάνεια ελέγχου από τον άξονα περιστροφής της επιφάνειας ελέγχου (control horn offset στο Σχήμα 1)
Σχήμα 1
ΕΞΑΙΡΕΤΙΚΑ ΕΠΙΚΙΝΔΥΝΗ ΣΥΝΔΕΣΜΟΛΟΓΙΑ
Μια πραγματικά επικίνδυνη συνδσμολογία προκύπτει όταν το ακρόντιζο είναι συνδεδεμένο στην εξωτερική τρύπα του σερβο-βραχίονα, ενώ το ακρόντιζο στην επιφάνεια ελέγχου είναι συνδεδεμένο στην εσωτερική τρύπα του βραχίονα ελέγχου (control horn). Η συνδεσμολογία αυτή επιλέγεται συνήθως από πιλότους που θέλουν τεράστιες κινήσεις στα πηδάλια για να κάνουν ελιγμούς 3D (Σχήμα 2).
Σχήμα 2
Όταν οι ντίζες είναι συνδεμένες με αυτόν τον τρόπο, κάθε "τζόγος" στο όλο σύστημα μεγενθύνεται σημαντικά με αποτέλεσμα να προκαλείται το γνωστό (και πολλές φορές καταστροφικό) fluttering (τρεμόπαιγμα ή συντονισμός της επιφάνειας ελέγχου).
Επιπλέον, αν ρυθμίσετε το ATV ή Travel Adjustment από τον πομπό σας ώστε να έχετε "κανονικές" κινήσεις, το αποτέλεσμα θα είναι να μικρύνετε την ανάλυση του καναλιού και την ακρίβεια στο κεντράρισμα ή στο "κράτημα" σε συγκεκριμένη θέση.
Το πιο σημαντικό είναι πως η επιφάνεια ελέγχου μεταδίδει (λόγω του μοχλού που δημιουργείται) ενισχυμένες τις δυνάμεις που δέχεται από την ροή του αέρα προς το σέρβο,με αποτέλεσμα το "φάγωμα" των γραναζιών και/ή του σερβοβραχίονα και επακόλουθο την πτώση/σύγκρουση του μοντέλου.
ΒΕΛΤΙΣΤΗ ΣΥΝΔΕΣΜΟΛΟΓΙΑ
Η βέλτιστη συνδεσμολογία προκύπτει όταν το ακρόντιζο στην μεριά του σερβομηχανισμού είναι κουμπωμένο στην πιο εσωτερική τρύπα του σερβο-βραχίονα, ενώ στον βραχίονα ελέγχου είναι κουμπωμένο στην πιο εξωτερική τρύπα (Σχήμα 3)
Σχήμα 3
Η συνδεσμολογία αυτή μεγιστοποιεί μηχανικά την απόδοση του σερβομηχανισμού στην επιφάνεια ελέγχου, δίνοντας την μεγαλύτερη ροπή, την καλύτερη δυνατή ανάλυση, ελαχιστοποιεί τους "τζόγους" και δίνει το καλύτερο δυνατό κεντράρισμα και "κράτημα" σε μια θέση της επιφάνειας ελέγχου.
Σε αυτή την περίπτωση πρέπει να προσέξουμε ιδιαίτερα ώστε η κίνηση του σερβο-βραχίονα να είναι ανεμπόδιστη σε όλη τη διαδρομή της και το ακρόντιζο να μην "βρίσκει" στο σερβοβραχίονα ή στο κουτί του σερβομηχανισμού.
ΑΠΟΔΕΚΤΗ ΣΥΝΔΕΣΜΟΛΟΓΙΑ
Σε επρίπτωση που η πιο πάνω Βέλτιστη Συνδεσμολογία δεν μας δίνει το επιθυμητό εύρος κίνησης, τότε έχουμε δύο επιλογές:
- μπορούμε να μετακινήσουμε το ακρόντιζο του σερβο-βραχίονα προς τα έξω, είτε
- μπορούμε να μετακινήσουμε το ακρόντιζο του βραχίονα ελέγχου προς τα μέσα
Σχήμα 4
Η καλύτερη επιλογή είναι η πρώτη γιατί αυτή εισάγει λιγότερο τζόγο στό όλο σύστημα ελέγχου.Αφού εξαντλήσουμε αυτή τη δυνατότητα και επιθυμούμε να αυξήσουμε περαιτέρω το εύρος κίνησης, τότε μόνο προχωρούμε και στη δεύτερη επιλογή (Σχήμα 4).
Γενικά, με τα σημερινά συστήματα τηλεκατεύθυνσης, προτιμάμε να έχουμε τις ρυθμίσεις ATV/Travel Adjustment όσο το δυνατόν πιο κοντά στο 100% και ταυτόχρονα να έχουμε και το επιθυμητό εύρος κίνησης. Σε αυτή την περίπτωση μπορούμε αυξάνοντας το ATV/Travel Adjustment στο 130% να έχουμε εύρος κίνησης κατάλληλο για 3D και μειώνοντάς το στο 70-80% να έχουμε (με dual-rates) αποδεκτή ανάλυση και εύρος κίνησης για normal πτήση.
(Τα σχήματα τα "δανείστηκα" από την σελίδα της Hobbico
- και την ευχαριστώ)
Ελπίζω το άρθρο να είναι κατανοητό. Σε κάθε περίπτωση πάντως θα προσπαθήσω να εξηγήσω κάθε απορία.
Βαγγέλης
- Συνημμένα
-
- S4.jpg (23.58 KiB) Προβλήθηκε 68 φορές
-
- S3.jpg (17.36 KiB) Προβλήθηκε 68 φορές
-
- S2.jpg (18.68 KiB) Προβλήθηκε 68 φορές
-
- S1.jpg (20.84 KiB) Προβλήθηκε 68 φορές
Απάντηση: Σύνδεση ντίζας σε servo
πολύ ωραία μπράβο!!!
επίσης να στηρίζετε καλά η ντίζα απο το σερβο μεχρι το ακρόντιζο
ειδικά αν η ντίζα είναι πλαστική και πάντα να υπάρχει περίβλημα
για το ruder έχω δει και βάζουν συρματόσκοινο. αυτό είναι κυρίως για μεγάλα
μοντέλα;, είναι ικανοποιητικό απο θέμα αντοχής ''τζόγου'' κ.τ.λ. ;
επίσης να στηρίζετε καλά η ντίζα απο το σερβο μεχρι το ακρόντιζο
ειδικά αν η ντίζα είναι πλαστική και πάντα να υπάρχει περίβλημα
για το ruder έχω δει και βάζουν συρματόσκοινο. αυτό είναι κυρίως για μεγάλα
μοντέλα;, είναι ικανοποιητικό απο θέμα αντοχής ''τζόγου'' κ.τ.λ. ;
Απάντηση: Σύνδεση ντίζας σε servo
Τα παραπάνω αφορούν συστήματα ελέγχου "push-pull", τα οποία στην μια κατεύθυνση "σπρώχνουν" ενώ στην άλλη "τραβούν".
Αυτά με τα συρματόσχοινα αφορούν pull-pull συστήματα για τα οποία μόλις βρω λίγο χρόνο θα γράψω.
Βαγγέλης
Αυτά με τα συρματόσχοινα αφορούν pull-pull συστήματα για τα οποία μόλις βρω λίγο χρόνο θα γράψω.
Βαγγέλης
-
Αντώνης Παπαδόπουλος
- Δημοσιεύσεις: 64
- Εγγραφή: Παρ Απρ 04, 2008 3:41 pm
Απάντηση: Σύνδεση ντίζας σε servo
vhal έγραψε: ↑
Όταν οι ντίζες είναι συνδεμένες με αυτόν τον τρόπο, κάθε "τζόγος" στο όλο σύστημα μεγενθύνεται σημαντικά με αποτέλεσμα να προκαλείται το γνωστό (και πολλές φορές καταστροφικό) fluttering (τρεμόπαιγμα ή συντονισμός της επιφάνειας ελέγχου).
Καλησπέρα,
Εχω μία παρατήρηση. Το fluttering δεν είναι αποτέλεσμα τόσο πολύ από την συνδεσμολογία των pushrods αλλά και από άλλα κατασκευαστικά λάθη ή και από αεροδυναμικές αδυναμίες στην σχεδίαση.
Μερικά από τα κατασκευαστικά λάθη που δημιουργούν το flutter είναι
1. Λάθος επιλογή ξυλείας
2. Λάθος τοποθέτηση ή αραιή τοποθέτηση των μεντεσέδων
3. Μεγάλο άνοιγμα μεταξύ πτέρυγας και πηδαλίου
4. Λάθος επιλογή servo
5. και φυσικά ο τζόγος στα pushrods και στα horns.
Καλή συνέχεια στην ωραία παρουσίαση.
Αντώνης Παπαδόπουλος
Απάντηση: Σύνδεση ντίζας σε servo
Αντώνη συμφωνώ απόλυτα στην παρατήρησή σου.
Απλά η συνδεσμολογία των pushrods σε κάποια περίπτωση ισοδυναμεί με το 4 (λάθος επιλογή servo - αφού δεν αξιοποιεί την ροπή του) και σε κάποια άλλη περίπτωση το 5 (που είναι προφανές),
Για το θέμα της ροπής σκεφτείτε πως ένας σερβομηχανισμός με ροπή π.χ. 4kg.cm στην εσωτερική τρύπα (έστω 1cm από τον άξονα του servo) δίνει δύναμη 4 kg, ενώ στην εξωτερική τρύπα (έστω 2cm από τον άξονα του servo) δίνει δύναμη 2 kg.
Ετσι αν έχουμε επιλέξει ένα servo με ροπή 4kg.cm στην ουσία, με την λάθος συνδεσμολογία, το μετατρέπουμε στο ισοδύναμο του servo με ροπή 2kg.cm
Ε! αυτός μπορεί να είναι ένας λόγος δημιουργίας του fluttering, όπως πολύ ορθά αναφέρεις παραπάνω.
Βαγγέλης
Απλά η συνδεσμολογία των pushrods σε κάποια περίπτωση ισοδυναμεί με το 4 (λάθος επιλογή servo - αφού δεν αξιοποιεί την ροπή του) και σε κάποια άλλη περίπτωση το 5 (που είναι προφανές),
Για το θέμα της ροπής σκεφτείτε πως ένας σερβομηχανισμός με ροπή π.χ. 4kg.cm στην εσωτερική τρύπα (έστω 1cm από τον άξονα του servo) δίνει δύναμη 4 kg, ενώ στην εξωτερική τρύπα (έστω 2cm από τον άξονα του servo) δίνει δύναμη 2 kg.
Ετσι αν έχουμε επιλέξει ένα servo με ροπή 4kg.cm στην ουσία, με την λάθος συνδεσμολογία, το μετατρέπουμε στο ισοδύναμο του servo με ροπή 2kg.cm
Ε! αυτός μπορεί να είναι ένας λόγος δημιουργίας του fluttering, όπως πολύ ορθά αναφέρεις παραπάνω.
Βαγγέλης
-
mastoras
Απάντηση: Σύνδεση ντίζας σε servo
Ωραία.....πολύ ωραία :>>>...................και μόλις ετοιμαζόμουν να γράψω απορία, σε ποια τρύπα των xorn θα πρέπει να τοποθετήσω τις ντίζες των πηδαλίων του ουραίου, ύψους-βάθους, και διεύθυνσης (δεξιά-αριστερά)........οι αγγλικές ορολογίες δικές σας :D
Αν και δεν τρελαίνομαι για μαθήματα δια αλληλογραφίας, εδώ όμως μπορώ να πω ότι χάρηκα αρκετά, και θα προχωρήσει το μοντέλο στην επόμενη φάση που είναι .............
Αν και δεν τρελαίνομαι για μαθήματα δια αλληλογραφίας, εδώ όμως μπορώ να πω ότι χάρηκα αρκετά, και θα προχωρήσει το μοντέλο στην επόμενη φάση που είναι .............
-
mastoras
Απάντηση: Σύνδεση ντίζας σε servo
.......το πέρασμα της ντίζας στους μοχλούς μετάδοσης κίνησης των πηδαλίων.
Πώς περνάμε όμως στις τρύπες την συρμάτινη ντίζα, που την διαμόρφωσα με την ειδική πένσα :p σε σχήμα Ζ ?
Μήπως έπρεπε να περάσω την ντίζα, πρώτα στους μοχλούς, και στην συνέχεια να τους κολλήσω επάνω στα πηδάλια ?
Αφου οι ντίζες διαπερνούν εσωτερικά την άτρακτο, μπαίνουν απο την ουρά, και μένει πίσω τελικά ένα μικρό κομμάτι ντίζα ώς τους μοχλούς, οι οποίες δεν μπορούν να λυγίσουν τόσο, ώστε να τις κουμπώσω επάνω τους.
Εκτός και εάν τις τσαλακώσω πολύ για να τις κουμπώσω τελικά, και στην συνέχεια τις "σινιάρω" με το χέρι, όπως ισιώνω τις κεραίες απο τα αυτοκίνητα που στην όπισθεν στραβώνουν απο τα κλωνάρια της συκιάς >:(.........και τελικά η τσαπατσουλιά θα γίνει !!!!
Το μάνουαλ της gws εδώ κάνει τον κινέζο......βγάλε την άκρη μόνος σου μάγκα, που ήθελες με 50 να αποκτήσεις αερομοντέλο :D
Πώς περνάμε όμως στις τρύπες την συρμάτινη ντίζα, που την διαμόρφωσα με την ειδική πένσα :p σε σχήμα Ζ ?
Μήπως έπρεπε να περάσω την ντίζα, πρώτα στους μοχλούς, και στην συνέχεια να τους κολλήσω επάνω στα πηδάλια ?
Αφου οι ντίζες διαπερνούν εσωτερικά την άτρακτο, μπαίνουν απο την ουρά, και μένει πίσω τελικά ένα μικρό κομμάτι ντίζα ώς τους μοχλούς, οι οποίες δεν μπορούν να λυγίσουν τόσο, ώστε να τις κουμπώσω επάνω τους.
Εκτός και εάν τις τσαλακώσω πολύ για να τις κουμπώσω τελικά, και στην συνέχεια τις "σινιάρω" με το χέρι, όπως ισιώνω τις κεραίες απο τα αυτοκίνητα που στην όπισθεν στραβώνουν απο τα κλωνάρια της συκιάς >:(.........και τελικά η τσαπατσουλιά θα γίνει !!!!
Το μάνουαλ της gws εδώ κάνει τον κινέζο......βγάλε την άκρη μόνος σου μάγκα, που ήθελες με 50 να αποκτήσεις αερομοντέλο :D
Απάντηση: Σύνδεση ντίζας σε servo
Δημήτρη, υποθέτω πως στη μια μεριά (του σερβο) έχεις Z-bend και στην άλλη έχεις τη φουρκέτα (clevis) ή το βαρελάκι (EZ-connector).
Από τη μεριά του servo, ξεβιδώνεις τη σερβοκεφαλή, περνάς το Z-bend και μετά βιδώνεις την σερβοκεφαλή. Προηγουμένως πρέπει να έχεις συνδέσει το servo στο δέκτη, να έχεις ανάψει πομπό και δέκτη, να βάλεις τα trim στο κέντρο, ώστε να κεντράρεις το σερβο.
Τέλος κουμπώνεις το clevis ή το EZ-connector!
Elementary my dear Watson!
Κατανοητόν?
Βαγγέλης
Από τη μεριά του servo, ξεβιδώνεις τη σερβοκεφαλή, περνάς το Z-bend και μετά βιδώνεις την σερβοκεφαλή. Προηγουμένως πρέπει να έχεις συνδέσει το servo στο δέκτη, να έχεις ανάψει πομπό και δέκτη, να βάλεις τα trim στο κέντρο, ώστε να κεντράρεις το σερβο.
Τέλος κουμπώνεις το clevis ή το EZ-connector!
Elementary my dear Watson!
Κατανοητόν?
Βαγγέλης